This document provides a brief introduction to using the statespacer
package. It does so by showcasing the estimation of a Local Level model
on the well known Nile data. See ?Nile for more information
about this dataset.
To start, let’s first introduce the Local Level model. Mathematically, this model can be represented as follows:
\[ \begin{aligned} y_t ~ &= ~ \mu_t ~ + ~ \varepsilon_t, ~~~~~~ \varepsilon_t ~ \sim ~ N(0, ~ \sigma_\varepsilon^2), \\ \mu_{t+1} ~ &= ~ \mu_t ~ + ~ \eta_t, ~~~~~~ \eta_t ~ \sim ~ N(0, ~ \sigma_\eta^2), \end{aligned} \]
where \(y_t\) is the dependent variable at time \(t\), \(\mu_t\) is the unobserved level at time \(t\), and \(\varepsilon_t\) and \(\eta_t\) are disturbances. This model has two parameters, \(\sigma_\varepsilon^2\) and \(\sigma_\eta^2\) that will be estimated by maximising the loglikelihood. In addition, the level \(\mu_t\) is a state parameter that will be estimated by employing the Kalman Filter. For extensive details about the algorithms employed, see Durbin and Koopman (2012).
Estimating this model using the statespacer package is simple. First, we load the data and extract the dependent variable. The dependent variable needs to be specified as a matrix, with each column being one of the dependents. In this case, we just have one column, as the Nile data comprises a univariate series.
# Load statespacer
library(statespacer)
# Load the dataset
library(datasets)
y <- matrix(Nile)To fit a local level model, we simply call the
statespacer() function. See ?statespacer for
further details.
fit <- statespacer(y = y,
local_level_ind = TRUE,
initial = 0.5*log(var(y)),
verbose = TRUE)
#> Warning: Number of initial parameters is less than the required amount of
#> parameters (2), recycling the initial parameters the required amount of times.
#> Starting the optimisation procedure at: 2023-01-27 22:26:16
#> Parameter scaling:[1] 1 1
#> initial value 6.623273
#> iter 10 value 6.334646
#> final value 6.334646
#> converged
#> Finished the optimisation procedure at: 2023-01-27 22:26:16
#> Time difference of 0.02121901512146 secsWe get a warning message about the number of initial parameters, as
we didn’t specify enough of them. We needed 2 initial parameters, but
specified only 1. This is okay, as the function just replicates the
specified parameters the required amount of times. This way, we don’t
need to worry about how many parameters are needed. We could also
specify too many initial parameters, in which case only the first few
are used. This is particularly useful when we want random initial
parameters. One could just simply specify
initial = rnorm(1000), and not have to worry about if
enough parameters were supplied.
Now, let’s check the estimated values of \(\sigma_\varepsilon^2\) and \(\sigma_\eta^2\).
c(fit$system_matrices$H$H, fit$system_matrices$Q$level)
#> [1] 15100.252 1468.724Note that we use the notation used in Durbin and Koopman (2012) for the system matrices. \(H\) being the system matrix for the variance - covariance matrix of the observation equation, and \(Q\) being the system matrix for the variance - covariance matrix of the state equation.
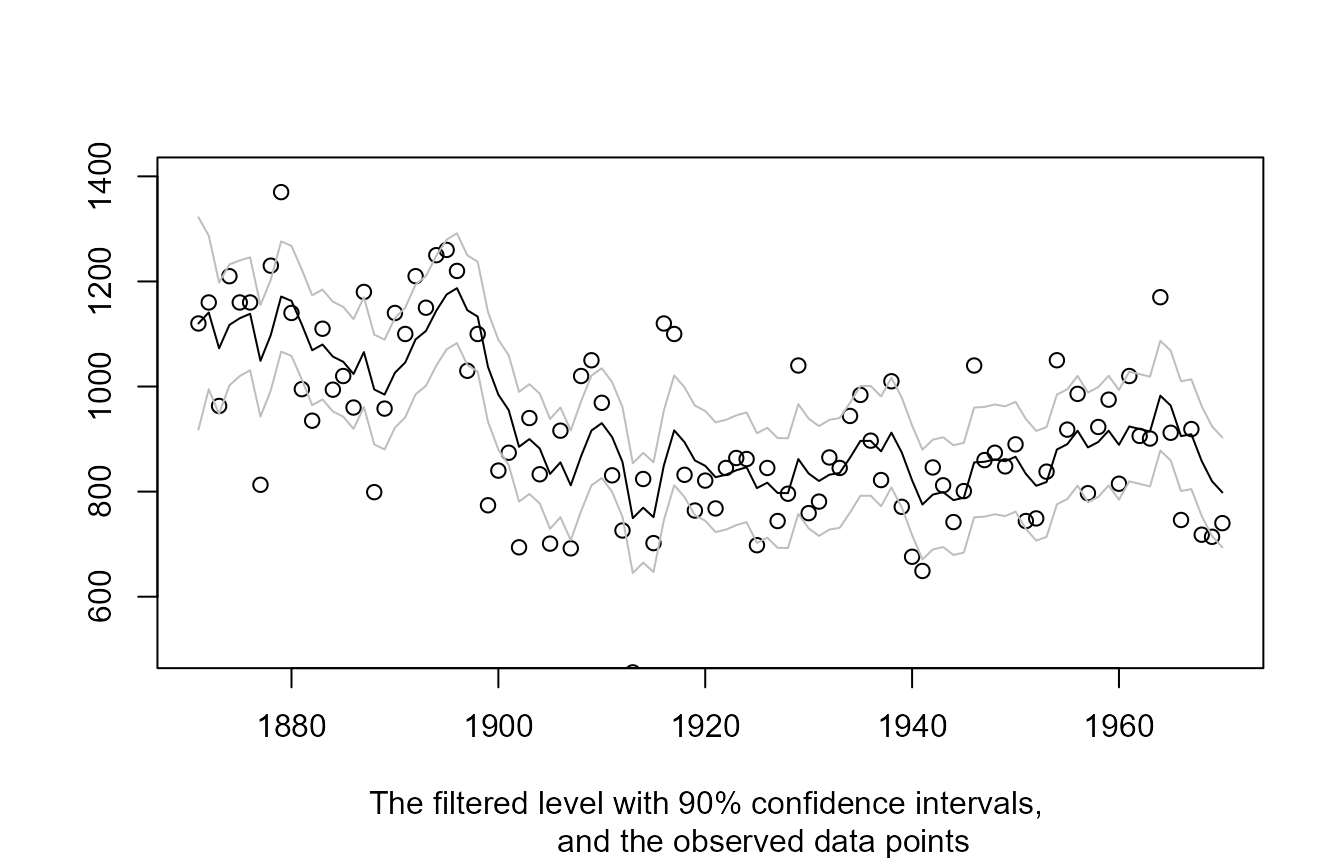
Checking out the estimated level is easy as well. The filtered level:
plot(1871:1970, fit$function_call$y, type = 'p', ylim = c(500, 1400),
xlab = NA, ylab = NA,
sub = "The filtered level with 90% confidence intervals,
and the observed data points"
)
lines(1871:1970, fit$filtered$level, type = 'l')
lines(1871:1970, fit$filtered$level + qnorm(0.95) * sqrt(fit$filtered$P[1,1,]),
type = 'l', col = 'gray'
)
lines(1871:1970, fit$filtered$level - qnorm(0.95) * sqrt(fit$filtered$P[1,1,]),
type = 'l', col = 'gray'
)
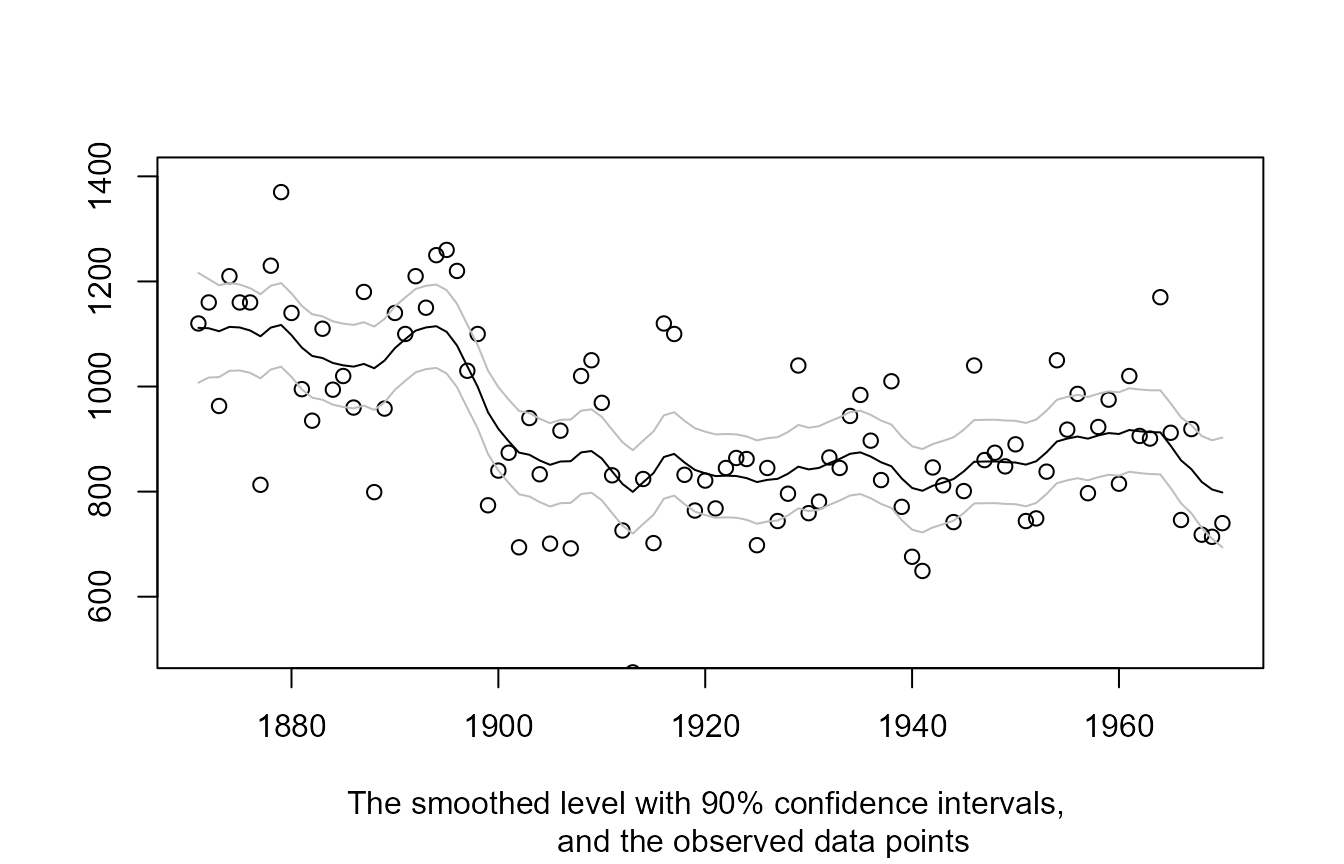
And the smoothed level:
plot(1871:1970, fit$function_call$y, type = 'p', ylim = c(500, 1400),
xlab = NA, ylab = NA,
sub = "The smoothed level with 90% confidence intervals,
and the observed data points")
lines(1871:1970, fit$smoothed$level, type = 'l')
lines(1871:1970, fit$smoothed$level + qnorm(0.95) * sqrt(fit$smoothed$V[1,1,]),
type = 'l', col = 'gray'
)
lines(1871:1970, fit$smoothed$level - qnorm(0.95) * sqrt(fit$smoothed$V[1,1,]),
type = 'l', col = 'gray'
)
The object returned by statespacer() exhibits many other
useful items. For more information about these items, please see
vignette("dictionary", "statespacer"). For more exhibitions
of the statespacer package, please see the other tutorials on https://DylanB95.github.io/statespacer/ or
browseVignettes("statespacer").